
2025
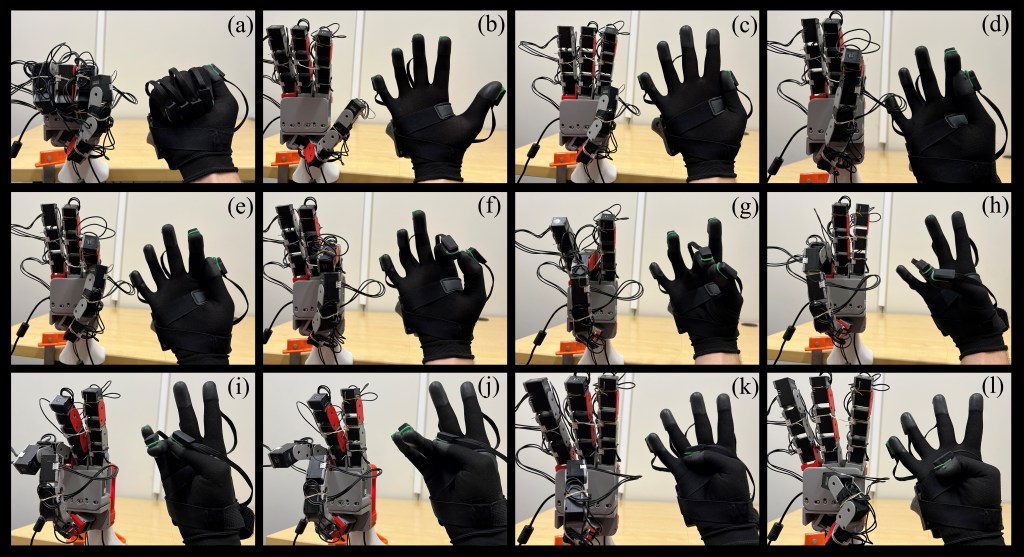
APEX-Glove: An Actuated, Open-Source, Hand-Exoskeleton Glove for Finger Motion Tracking and Kinesthetic 3D Force Feedback (paper links coming soon!)
(ICRA 2026) The world’s first wearable exoskeleton glove with 3D force feedback on all fingers. It features industrial-grade motion capture (comparable to the $5000 MANUS Metagloves). It also has dynamic compensation for haptic transparency. Onwards to kinesthetic robot hand control!
We’re open-sourcing it soon (it costs less than $700 to build one!). We’ll share hardware designs, 3DP files, assembly guides, and software to get you up-and-running with groundbreaking haptic tech!

Wearing a Robotic Hand to Feel 3D Force Feedback: Analysis and Virtual Reality Application of the Hand-in-Hand System (IEEE Xplore)
(IROS 2025) This project is a bit eclectic… it entails a method to transform robotic hands into wearable exoskeleton “gloves” to feel 3D force feedback in VR. I’m dead serious.
You also get some decent finger tracking for free!
Cite as: N. Kosanovic and J. C. Vaz, “Wearing a Robotic Hand to Feel 3D Force Feedback: Analysis and Virtual Reality Application of the Hand-in-Hand System,” 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025), Hangzhou, China, 2025.

Towards Miniature Humanoid Tele-Loco-Manipulation using VR and RL (IEEE Xplore)
(Humanoids 2025) Lots of cute, tiny humanoid robots exist (like OP3), but nearly nobody uses modern techniques like VR manipulation + RL locomotion on them. So we did exactly that.
Cite as: N. Kosanovic, J. Dowdy and J. C. Vaz, “Towards Miniature Humanoid Tele-Loco-Manipulaion using VR and RL,” 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids 2025), Seoul, South Korea, 2025.

A Virtual Reality Framework for Safe Global Bimanual Telepresence (IEEE Xplore)
(CASE 2025) A system paper for my UofL avatar robot “DOLA”. We showed off our two-handed, two-armed compliant manipulator with low-latency 4K binocular video streaming, operating over a distance of 30,000 km! Now you can play Jenga from wherever you want.
Cite as: N. Kosanovic and J. C. Vaz, “A Virtual Reality Framework for Safe Global Bimanual Telepresence,” 2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), Los Angeles, CA, USA, 2025, pp. 3412-3419, doi: 10.1109/CASE58245.2025.11164157.

Humans and Robots, Hand-in-Hand: Using Bilateral Telepresence to Turn Robotic Hands into Wearable Haptic Exoskeletons (IEEE Xplore)
(UR 2025) Sometimes ridiculous ideas are pretty cool. This one lets you wear a robot to feel what another robot touches using bilateral control.
Cite as: N. Kosanovic and J. C. Vaz, “Humans and Robots, Hand-in-Hand: Using Bilateral Telepresence to Turn Robotic Hands into Wearable Haptic Exoskeletons,” 2025 22nd International Conference on Ubiquitous Robots (UR), College Station, TX, USA, 2025, pp. 67-74, doi: 10.1109/UR65550.2025.11078031.
2024
Approach of Team Avatar-Hubo to the ANA Avatar XPRIZE Finals (IEEE Xplore)
(ROMAN 2024) Covers the Avatar-Hubo system we brought to the ANA Avatar XPRIZE Finals!
Cite as: B. Kim, N. Kassai, Z. Castrejon, N. Kosanovic, J. C. Vazi and P. Oh, “Approach of Team Avatar-Hubo to the ANA Avatar XPRIZE Finals,” 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), Pasadena, CA, USA, 2024, pp. 37-42, doi: 10.1109/RO-MAN60168.2024.10731240.
Introducing H4ND: Hyper-resilient, 4-Fingered, Nimble, Dexterous Anthropomorphic Robot Hand Optimized for Research (IEEE Xplore)
(UR 2024) A new robotic hand! It costs about ~$500 USD, 4 fingers, 4 DoF/Finger, and it uniquely features sacrificial parts to minimize repair times! Can lift up to 4.75 kg with the “meme grasp”.
Cite as: N. Kosanovic and J. C. Vaz, “Introducing H4ND: Hyper-resilient, 4-Fingered, Nimble, Dexterous Anthropomorphic Robot Hand Optimized for Research,” 2024 21st International Conference on Ubiquitous Robots (UR), New York, NY, USA, 2024, pp. 342-349, doi: 10.1109/UR61395.2024.10597461.
ART: Avatar Robotics Telepresence—the future of humanoid material handling loco-manipulation (Springer Link)
(Journal of Intel. Serv. Rob. 2024) A detailed overview of the Avatar-Hubo system for VR-based material handling (carrying water buckets, ladders, pushing wheelbarrows).
Cite as: J. Vaz, N. Kosanovic and P. Oh, “ART: Avatar Robotics Telepresence—the future of humanoid material handling loco-manipulation,” in Intel Serv Robotics, Dec. 2023. doi: 10.1007/s11370-023-00499-x [Online].
2023
Real-Time Joint Trajectory Optimization and Predictive Safety Filtering for Telepresence Avatar Robotics (IEEE Xplore)
(ICAR 2024) Some motion profile work to keep real-time motion retargeting smooth.
Cite as: J. C. Vaz, N. Kosanovic, B. Kim and P. Y. Oh, “Real-Time Joint Trajectory Optimization and Predictive Safety Filtering for Telepresence Avatar Robotics,” 2023 21st International Conference on Advanced Robotics (ICAR), Abu Dhabi, United Arab Emirates, 2023, pp. 395-401, doi: 10.1109/ICAR58858.2023.10406992.

Biomimetic Real-Time Multimodal Tactile Perception and Haptics for Telepresence Humanoids (IEEE Xplore)
(ICAR 2024) A haptics system for avatar robots that uses the WEART TouchDIVER! Let’s users feel forces, vibrations, and even temperatures with their own hands.
Cite as: N. Kosanovic, J. C. Vaz and P. Y. Oh, “Biomimetic Real-Time Multimodal Tactile Perception and Haptics for Telepresence Humanoids,” 2023 21st International Conference on Advanced Robotics (ICAR), Abu Dhabi, United Arab Emirates, 2023, pp. 613-620, doi: 10.1109/ICAR58858.2023.10406943.

Highly Dexterous Humanoid Manipulator (HDHM) Designed for Avatar Systems (IEEE Xplore)
(ICCE 2023) My first foray into building robotic hands! This was also one of the first Dynamixel XL/XC330 robotic hands ever made (even before the LEAP Hand). It had 20 DoF, 4 fingers (thus 5 DoF/finger), a camera in the palm, and a SynTouch NumaTac tactile sensor on the BACK of the index finger.
A cool feature about this hand is that the fingers were hypermobile, enabling them to rotate around!
Cite as: T. Tran, J. Chagas Vaz, N. Kosanovic and P. Oh, “Highly Dexterous Humanoid Manipulator (HDHM) Designed for Avatar Systems,” 2023 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 2023, pp. 1-5, doi: 10.1109/ICCE56470.2023.10043492.
2022

Avatar-Darwin a Social Humanoid with Telepresence Abilities Aimed at Embodied Avatar Systems (IEEE Xplore)
(Humanoids 2022) Here, we built up a time humanoid that people could control from a distance for social interaction!
Cite as: A. Dave, J. C. Vaz, J. Kim, N. Kosanovic, N. Kassai and P. Y. Oh, “Avatar-Darwin a Social Humanoid with Telepresence Abilities Aimed at Embodied Avatar Systems,” 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids), Ginowan, Japan, 2022, pp. 47-52, doi: 10.1109/Humanoids53995.2022.10000176.

Immersive Auditory-Visual Real-Time Avatar System of ANA Avatar XPRIZE Finalist Avatar-Hubo (IEEE Xplore)
(ARSO 2022) This overviewed the vision system of our robot Avatar-Hubo from the 2022 ANA Avatar XPRIZE Semifinals.
Cite as: J. C. Vaz, A. Dave, N. Kassai, N. Kosanovic and P. Y. Oh, “Immersive Auditory-Visual Real-Time Avatar System of ANA Avatar XPRIZE Finalist Avatar-Hubo,” 2022 IEEE International Conference on Advanced Robotics and Its Social Impacts (ARSO), Long Beach, CA, USA, 2022, pp. 1-6, doi: 10.1109/ARSO54254.2022.9802964.
